고객만족을 위한 고품질의 엔지니어링 서비스 제공
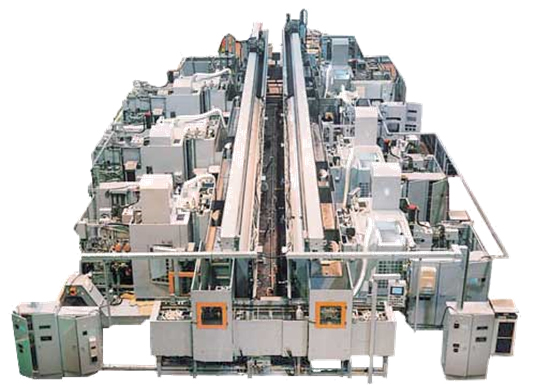
제조 공정에서의 고정밀/고속 물류 이송 시스템
노동시간의 단축, 생산성 향상, 빠른 작업시간
갠트리 로봇 주축의 全 공장 자동화 세트 턴키(Turn-Key)로 공급

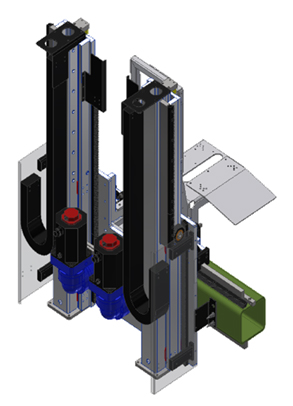
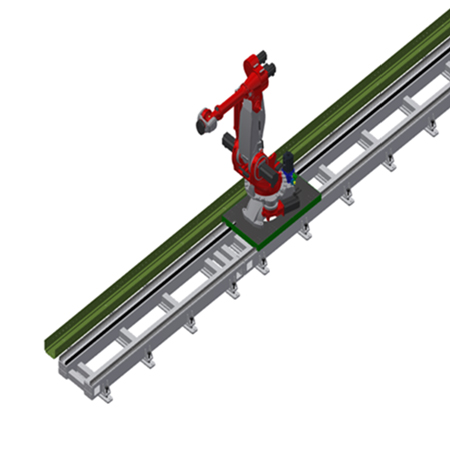
갠트리로봇 시스템

컨베이어

자동적재유닛

세척 유닛

외형측정 유닛

Vision 유닛

소형모듈
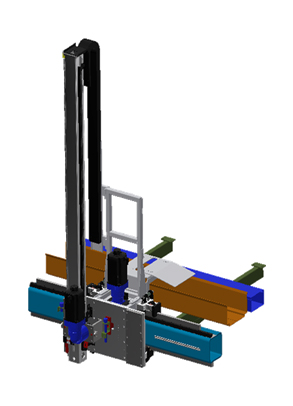
중소형 싱글 모듈

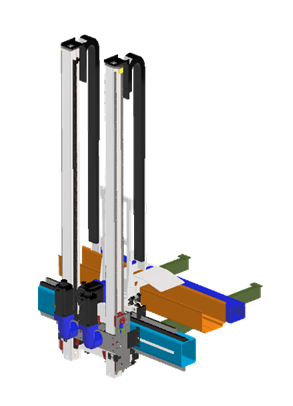
중소형 탠덤 모듈


중대형 탠덤 모듈

텔레스코픽 모듈



Pallet return type

Top roller chain type
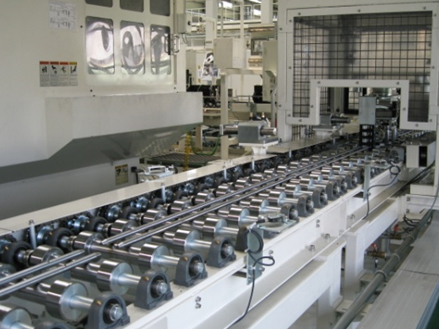
Friction roller type

WASHING & AIR BLOW ASS’Y

Work 로딩부 & Tilting gripper
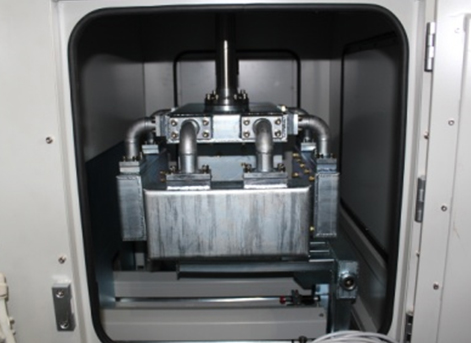
Air nozzle box